
DepthSpace3D
a digital tool for 3D Space Syntax analysis
 PORTRAIT
PORTRAIT
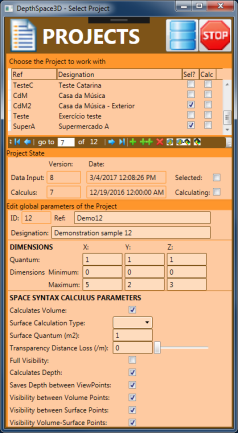
DepthSpace3D is a digital tool for ‘Space Syntax’ analysis in 3D spaces, for Windows computers.
DepthSpace3D is similar to 2D software applications like DepthMapX. It can deal with the analysis of 3D spatial configuration, visibility and accessibility.
| Concept | Denotation | Discretization for the operational model |
|---|---|---|
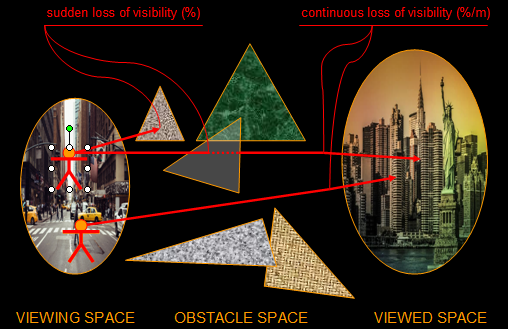
| Viewing Space | ||
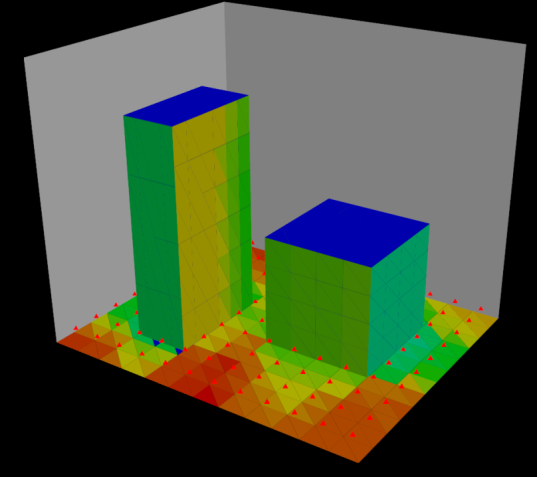
| The space of the possible viewpoints (people, cameras ...) | Set of points. Tendentiously all the points will represent the same amount of space, but they can have a different volume. And, as there can be some differences in the density of viewing agents per volume, there is also a weight attribute. | |
| Viewed Space | ||
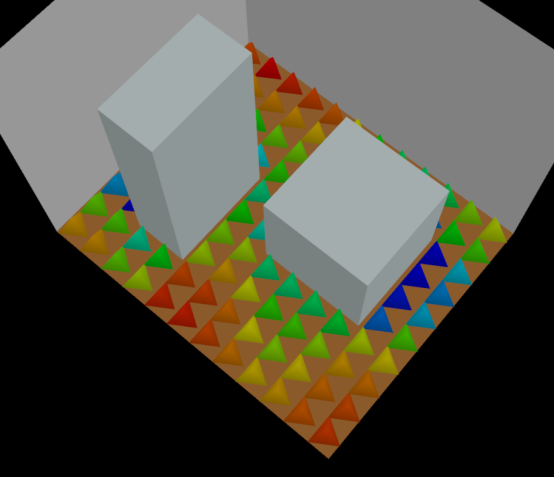
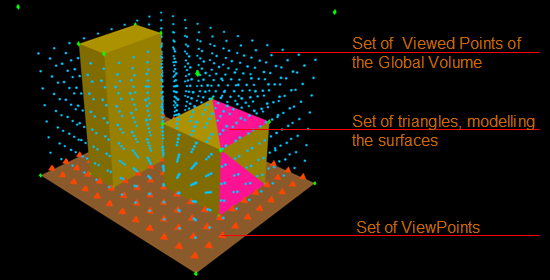
| Surfaces | Surfaces of the objects in the 3D global volume | Set of points, centroids of little homomorphic triangles in which the triangles that shape the surfaces are divided. |
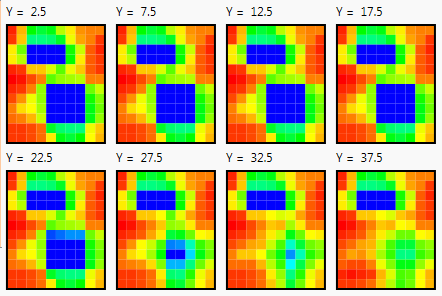
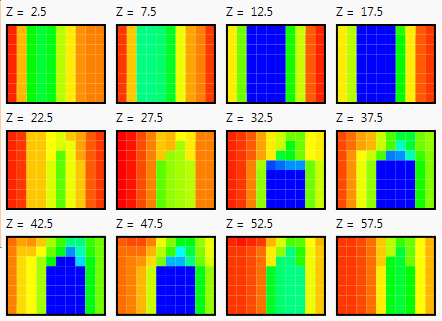
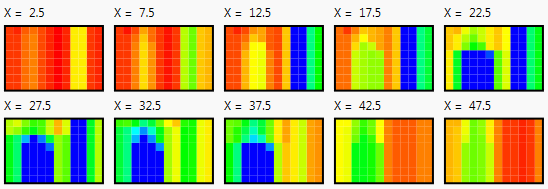
| Global Volume | The entire 3D global volume | Set of points. Although data representation does not imposes any other restriction, the user interface guides to equal amount of space for each point. Global space is cut in axial (X, Y and Z) slices of equal thickness in each axis. Nevertheless, the thickness can be different from axis to axis. |
| Obstacle space | ||
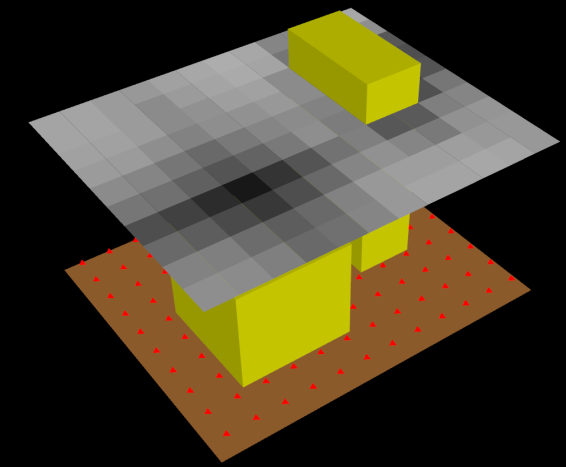
| Volume opacity | A continuous loss of visibility throughout the 3D global volume (fog, optical effects ...) | |
| Surfaces | Surfaces with a certain degree of opacity | Set of triangles, modelling the surfaces. |
(domain: 'cartesian product' of viewing space * viewed space)
| Concept | Counter-domain | Denotation |
|---|---|---|
| Distance | set of real-numbers | Distance from any point of the viewing space to any point of the viewed space |
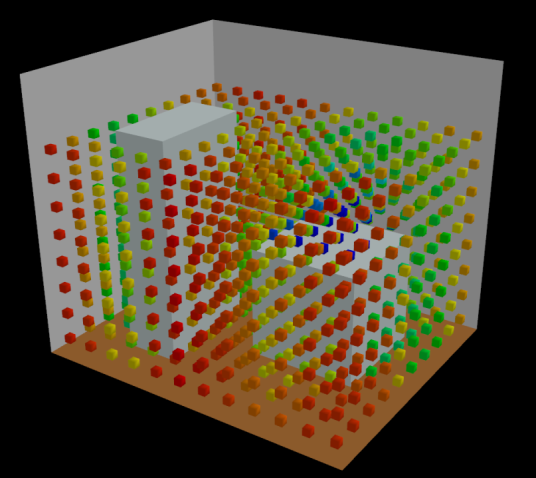
| Visibility | set of real-numbers from 0 to 1 | The degree of visibility of each point in the Viewing Space to any point in the Viewed Space through the Obstacle Space |
| Depth (although depth is a derived concept from visibility, it is offered as a primitive to the users) | set of integers | Minimum number of straight lines in a Path of the Viewing space that need to be traversed from any point in the Viewing Space to see any point in the Viewed Space |
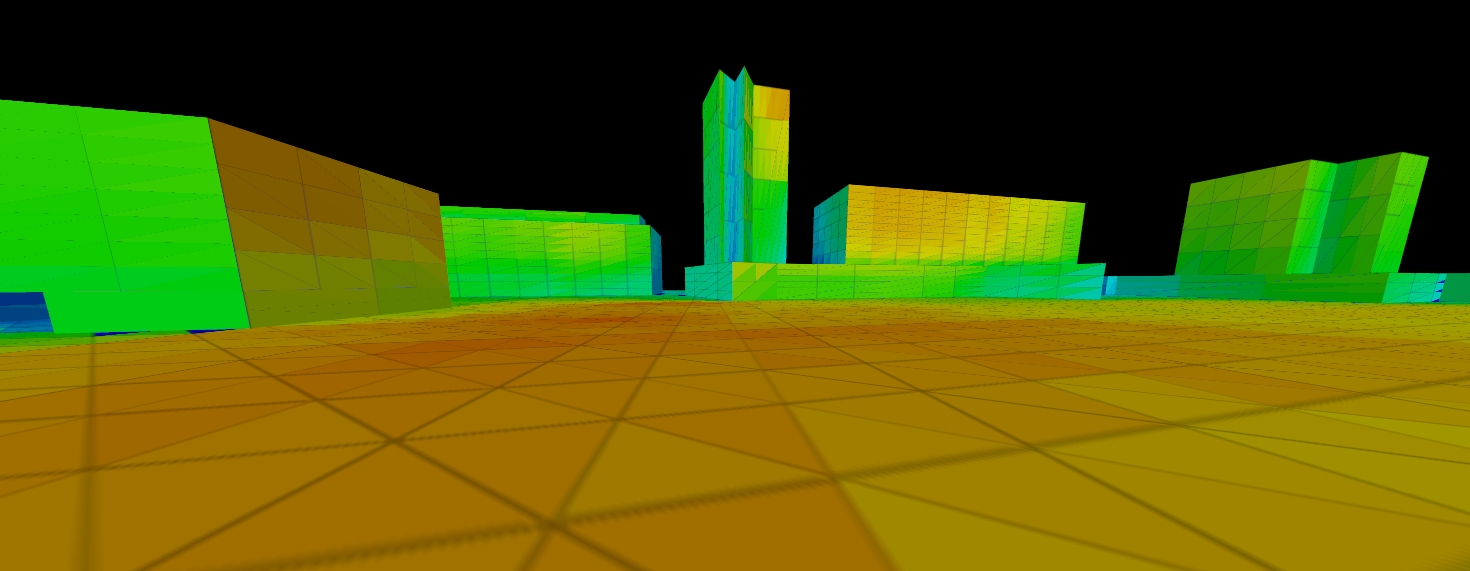
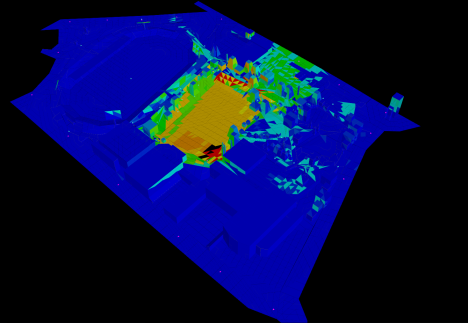
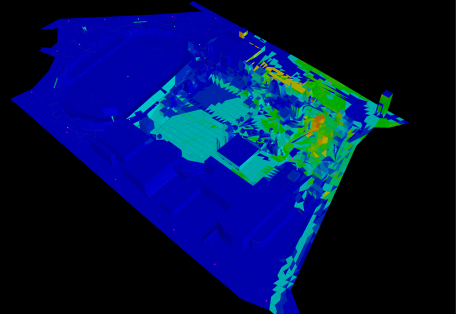
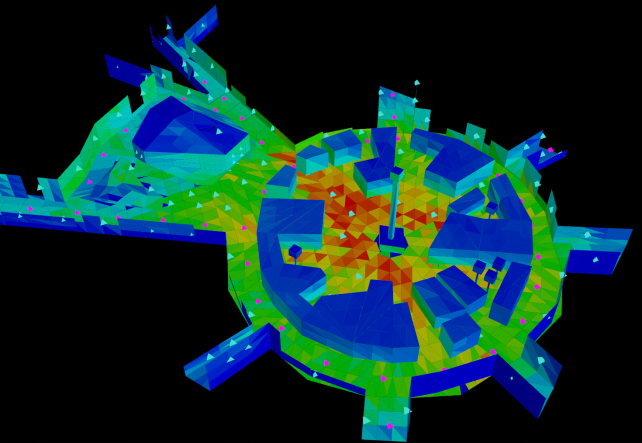
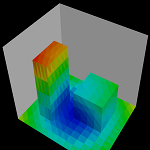
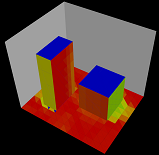
3D analysis seems to bring better results in rough topography of the urban spaces; dynamic volumetric geometry: size, configuration, elevation and interpenetration; joint analysis of the interior of each building and its urban environment, in particular when there are high-rise buildings.
Due to operational constraints (time and memory) the use of DepthSpace3D should not be extended to large scale case studies.
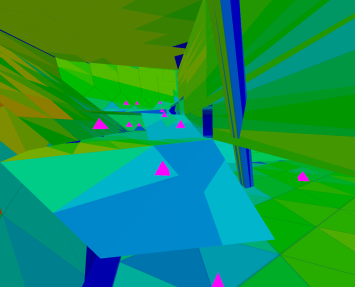
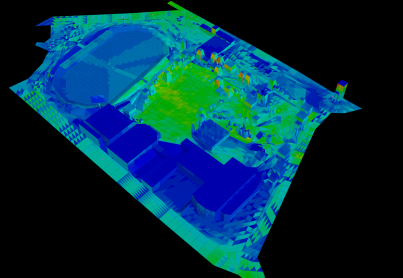
Some case studies are presented in the figure – interior and exterior spaces, small-scale urban spaces, commercial and complex buildings, landscape studies.
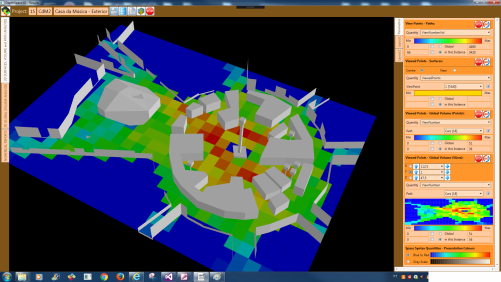
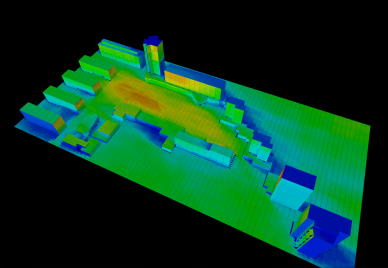
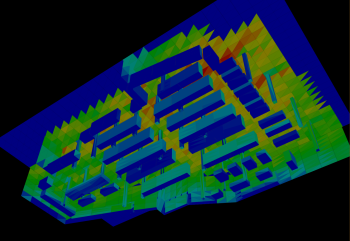

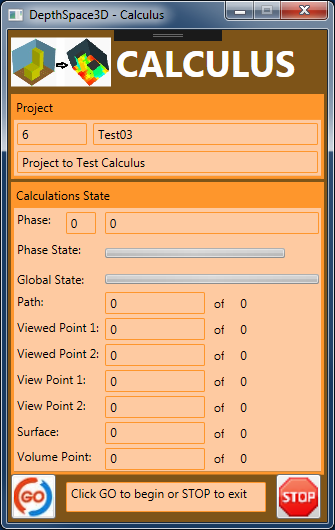
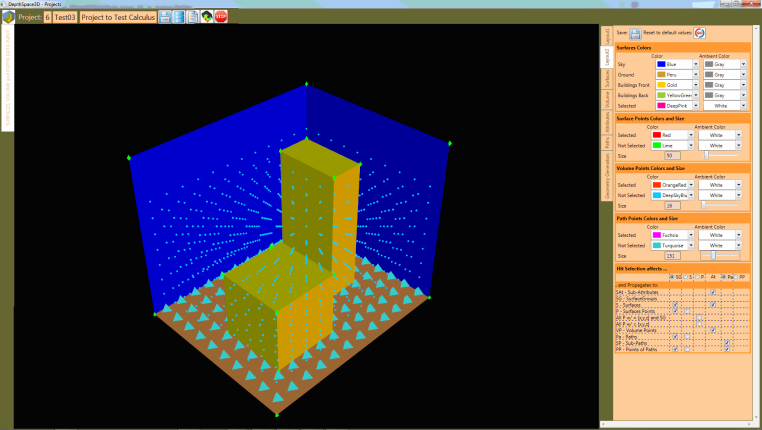
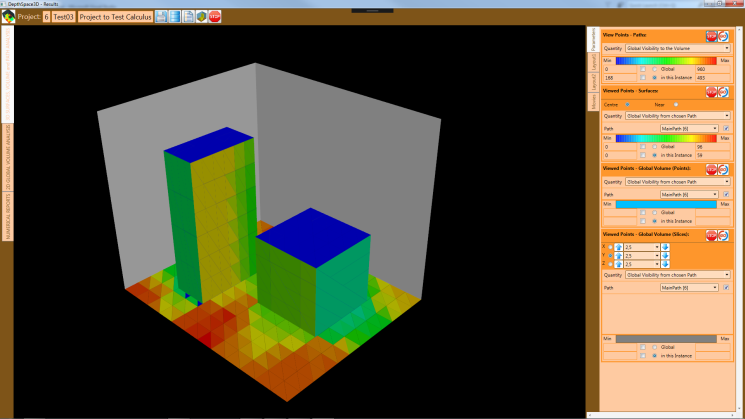
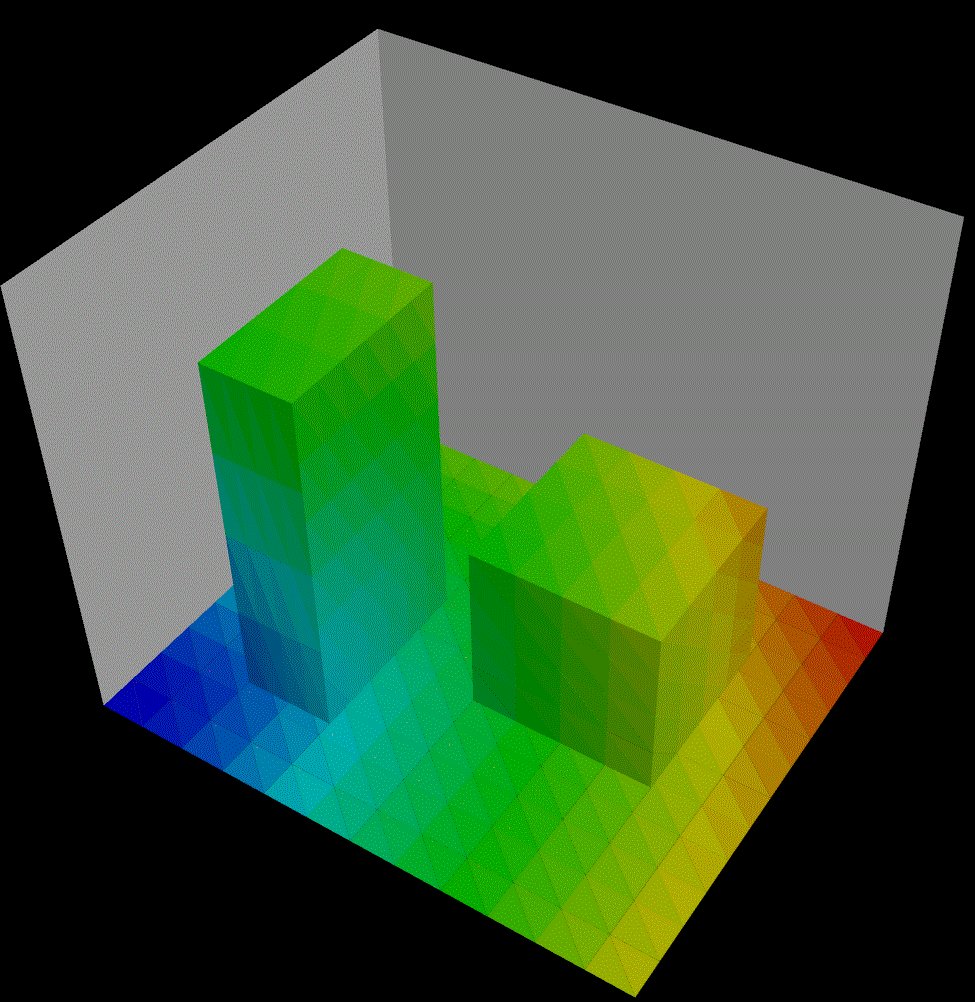
The Space Syntax Functions / Quantities can be seen numerically and graphically.
Animated graphics (run-time movies) can also be produced.
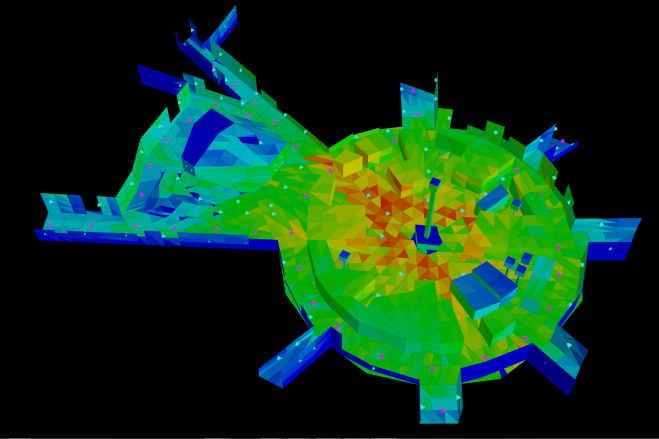
Paths constitute sets of View Points that have this same attribute. It is intended to model variegated situations of the Viewing Space. Each path has its density that represents the amount of viewing people. This density multiplied by the volume of each View Point gives the weight of each View Point.
This organization allows the study of different scenarios of human distribution.
Paths for exterior walks, wandering, crossings and remarkable points of a sports park are represented in the figures.
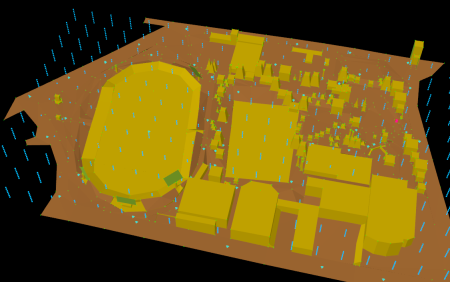
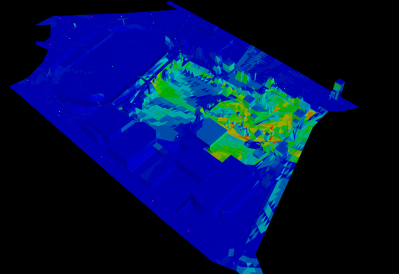
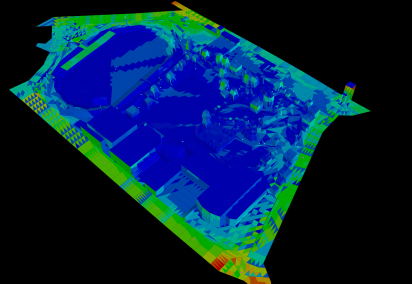
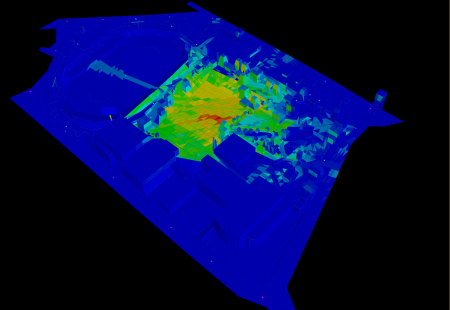
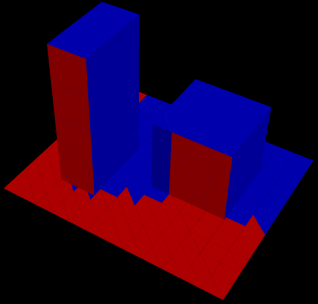
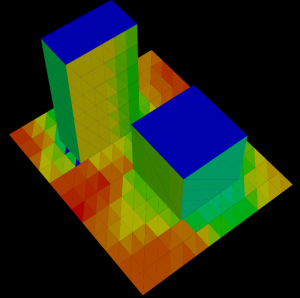
Visibility from the viewing space to the viewed space is a continuous quantity varying from 0 (not visible) to 1 (full visibility). The figure represents visibility of the same model, considering the changes in visual permeability of the trees in winter and summer.
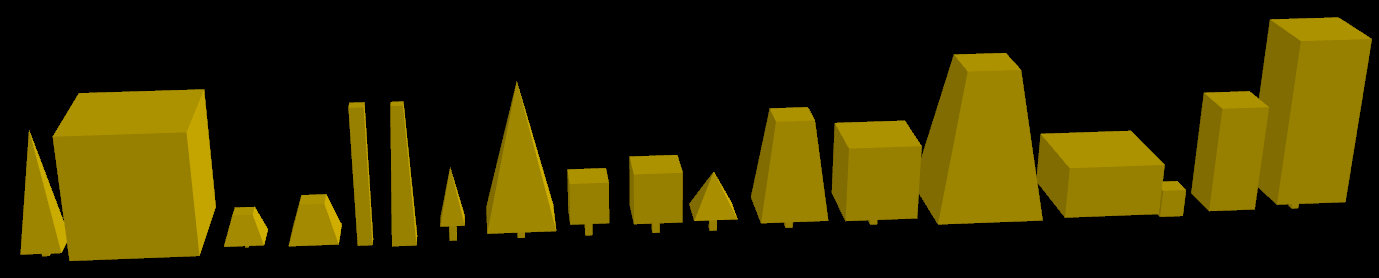
Users may use and create geometry generators, parametric shapes that facilitate the modelling of the case study.
The shapes on the figure (modelling current types of trees and shrubs in the Portuguese landscape) were created with the help of geometry generators.
Depth Space3D includes an editor for a generative grammar that can expand the Space Syntax lexicon to be used. The primitive quantities are visibility, distance and depth. But it's possible to declare how to produce new quantities.
This is done through SQL queries, a very well-known and widespread query language for SQL databases.
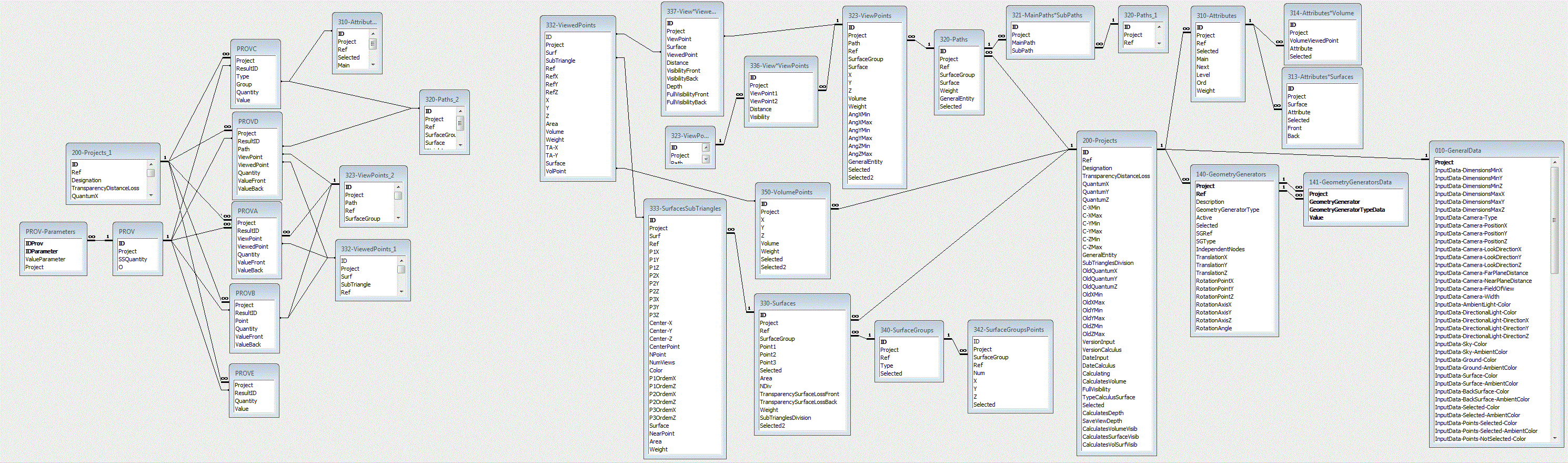
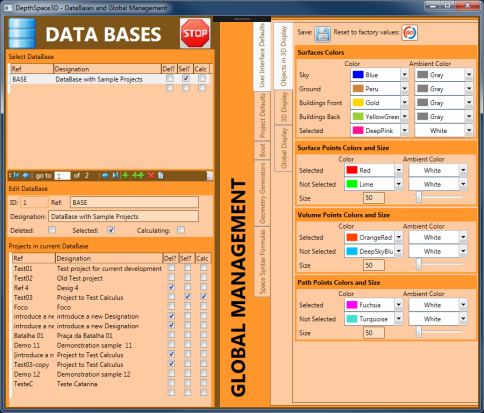
DepthSpace3D implements separation of data and algorithm. A SQL database stores all the information of the case studies.
The great advantage of this implementation is the openness of the software. The structure of the database is provided and can be used outside the DepthSpace3D application, by everyone interested in other developments.